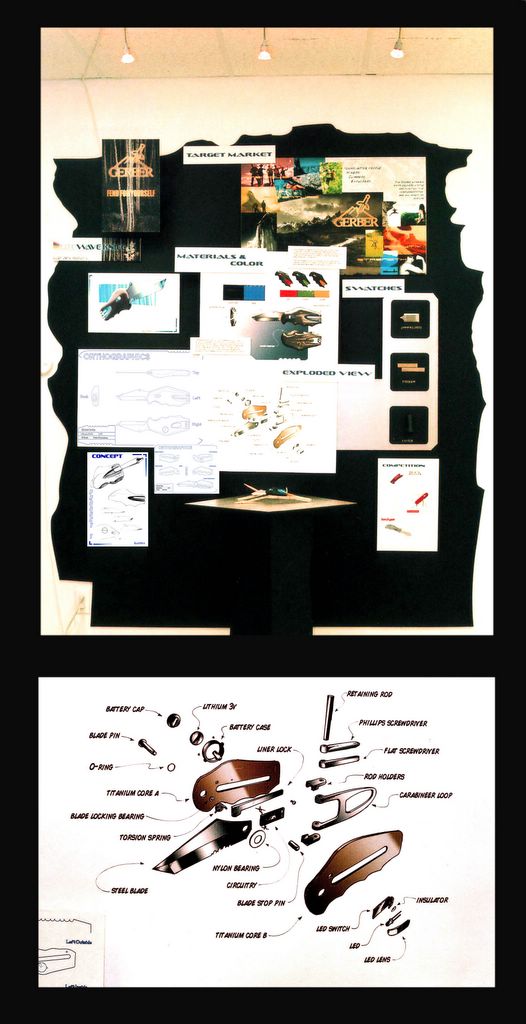
This is my Product 1 final presentation and the result of my 1st 2 years of industrial design. I have finally completed my 1st actual product design course combining skills of modelmaking, sketching & rendering, as well as computer graphic design/ layout backed by lots of research. The assignment was camping gear. Behold the Gerber LiteWave knife. This light titanium core knife is designed and targeted for the young active climber/hiker. This knife was designed to deliver just the right amount of functionality to its target market. 1st and foremost it is a knife, featuring a partially serrated steel tanto style blade with assisted opening action made available using a torsion spring and lock bearing. It's secondary functions include an L.E.D. with 4 distinctly different light patterns (low, high, blink, and SOS), A Phillips head screwdriver, a flat head screwdriver, and a fold away large hook for carabineer use. The knife comes in black and 4 different secondary colors (blue, red, green, and yellow) as well as left and right handed versions. Sporty looks and great ergonomics make the LiteWave knife inviting to have in the hand and comfortable. The strength and styling of the tanto blade in contrast keeps the LiteWave knife from losing its feeling of a powerful tool.
 For my 1st actual full on product presentation I think it went quite well. My presentation boards were very large and easy to read. I used risers to help my presentation pop off the background even more. The table the model is sitting on is just a spray-painted piece of foam core with paper backing (looks like steel or something). I made the model from Renshape (synthetic wood), laser cut acrylic blade/tools, and a lot of bondo. The L.E.D. actually does work when you press it down and is quite bright. And yes that is track lighting on the ceiling. And no I didn't whittle the stick with the knife model. In terms of presentation mine really stood out from the crowd, as for the product would you buy one?
For my 1st actual full on product presentation I think it went quite well. My presentation boards were very large and easy to read. I used risers to help my presentation pop off the background even more. The table the model is sitting on is just a spray-painted piece of foam core with paper backing (looks like steel or something). I made the model from Renshape (synthetic wood), laser cut acrylic blade/tools, and a lot of bondo. The L.E.D. actually does work when you press it down and is quite bright. And yes that is track lighting on the ceiling. And no I didn't whittle the stick with the knife model. In terms of presentation mine really stood out from the crowd, as for the product would you buy one?